To establish an expression for computing the inverse of matrices, it is crucial to gain an understanding of their fundamental properties
By defining the inverse of a matrix as one that undoes its transformation, several immediate properties naturally emerge
Cancellation Property
Since the transformation caused by the inverse matrix cancels the effect of the original matrix, their composite matrix will have the effect of doing nothing
Ω^−1Ω^=Matrix That Does Nothing
A matrix that performs no transformation have its columns as the original basis vectors. We refer to this matrix as the identity matrix, I^
The definition of the inverse matrix can therefore be summarized as
A^−1Ω^=I^
The Identity Matrix
Multiplying any matrix by the identity matrix gives back the same matrix
Ω^I^=I^Ω^=Ω^
This is because the identity matrix does not perform any transformation, so the overall effect is just the other matrix
The Inverse of Composite Matrix
The inverse of a composite matrix is the product of the inverse matrices in reverse order
(A^B^)−1=(B^−1A^−1)
Reversing the order of the inverse matrices corresponds to reversing the effect of the transformations
-We can rationalize this as reversing the effect of linear transform from the last transformation to the first
The Inverse of an Inverse
The inverse of an inverse matrix is the original matrix
(Ω^−1)−1=Ω^
Just like how the inverse matrix cancels the effect of the original matrix, we can also say that the original matrix cancels the effect of the inversed matrix
Order of Multiplication
The order of multiplication between a matrix and its inverse does not affect the result
Ω^Ω^−1=Ω^−1Ω^=I^
This is because the inverse of an inverse matrix is the original matrix
Square Matrices and Inverses
Only square matrices have inverses
We have shown that Ω^Ω^−1 and Ω^−1Ω^ are both valid matrix-multiplication, which is only possible when
Ω^column=Ω^row−1andΩ^column−1=Ω^row
Moreover, both Ω^Ω^−1 and Ω^−1Ω^ produce the same matrix, I^, which means the dimension of the two composite matrices are the same
Ω^row=Ω^row−1andΩ^column=Ω^column−1
This means that Ωrow=Ωcolumn=Ωrow−1=Ωcolumn−1
In other words, only square matrices can have inverses
Determinant and Inverses
Only square matrices with a non-zero determinant are eligible to have inverses, while those with a determinant of zero do not
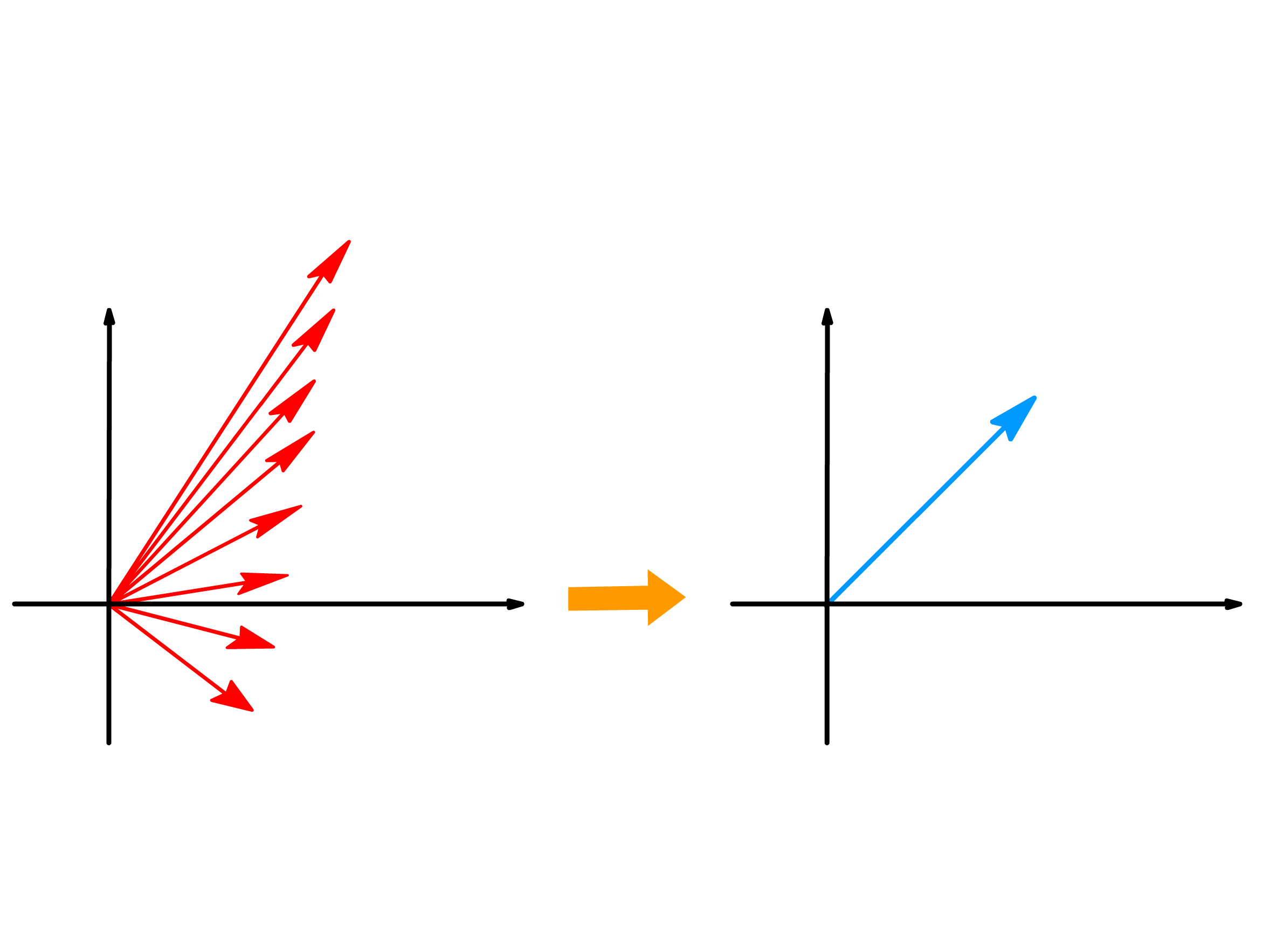
When the determinant of a square matrix is zero, the associated transformation compresses the space into a smaller dimension
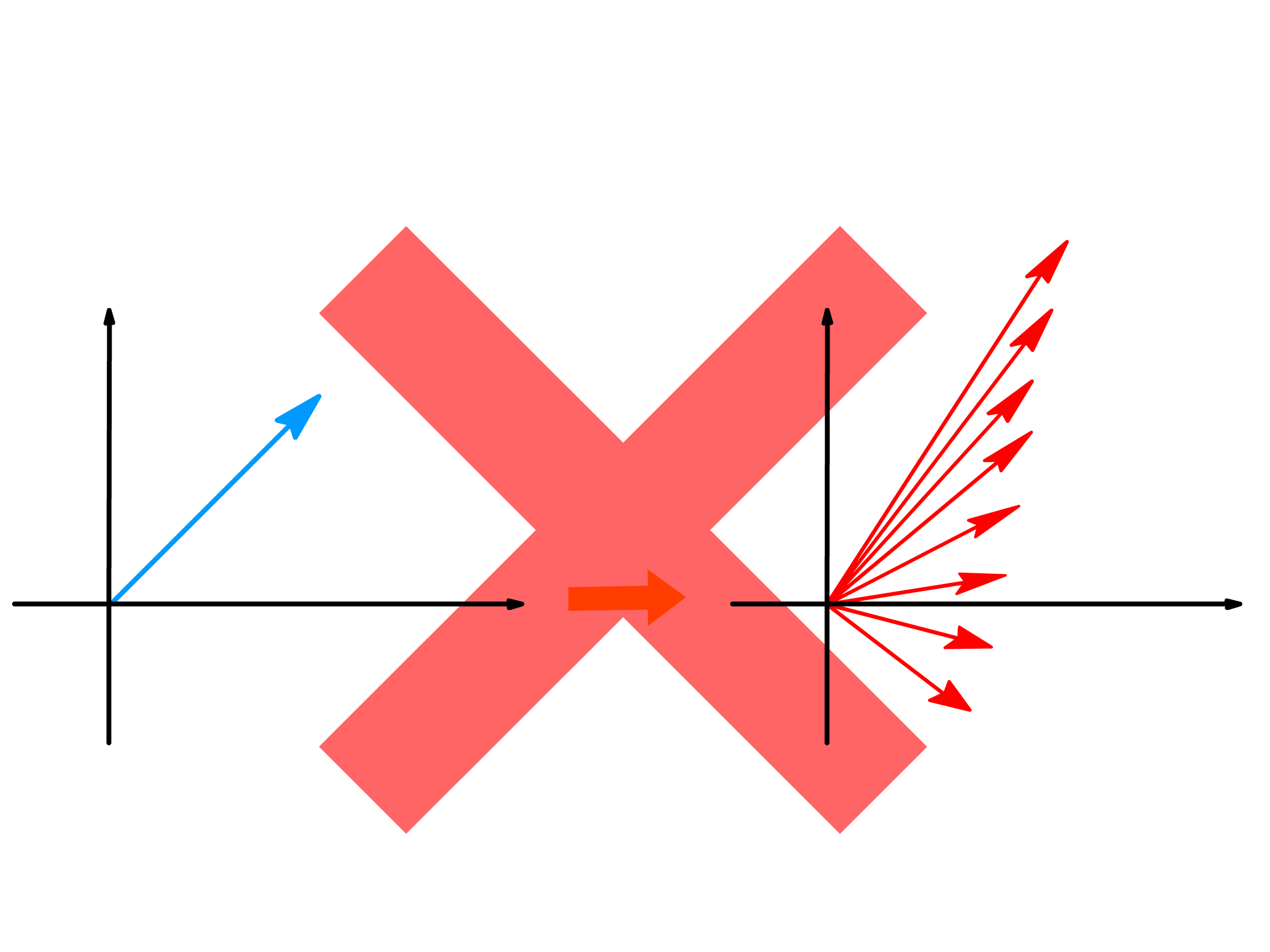
In these cases, the transformation collapses multiple distinct input vectors into the same output vector
To reverse such a transformation, an inverse matrix would need to produce multiple output vectors for a single input vector. However, allowing multiple output vectors violates the fundamental properties of linear transformations, rendering these types of transformations ineligible for inverses
To compute the inverse matrix, we can derive a general expression that allows us to determine each entry of the inverse
The inverse matrix is closely connected to the determinant, as both are defined only for square matrices, and the inverse exists only when the corresponding square matrix has a non-zero determinant
Therefore, we would expect the formula for the inverse matrix to involve the determinant
The goal of the derivation is to find a formula that allows us to determine each entry in the inverse matrix